Publications
2021
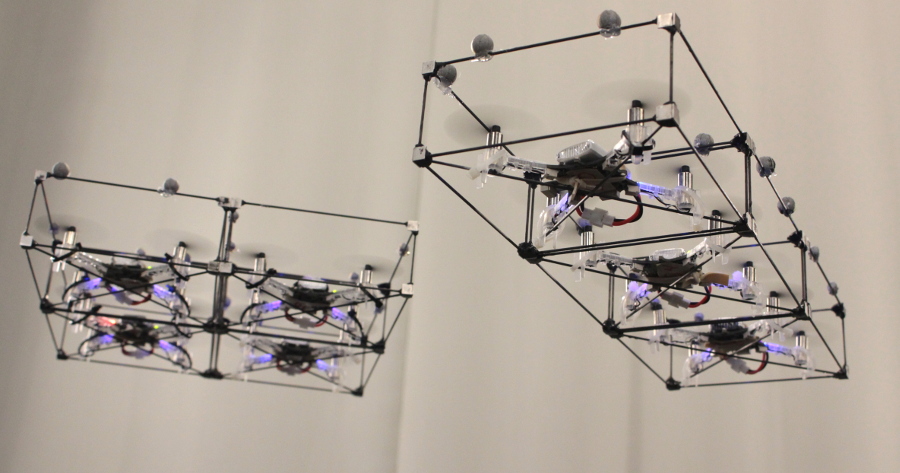
H-ModQuad: Modular Multi-Rotors with 4, 5, and 6 Controllable DOF Proceedings Article
In: 2021 IEEE International Conference on Robotics and Automation (ICRA), 2021, ISBN: 978-1-7281-9077-8.
Finding Structure Configurations for Flying Modular Robots Proceedings Article
In: 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 6970-6976, 2021.

Vision-Based Self-Assembly for Modular Multirotor Structures Journal Article
In: IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 2202-2208, 2021.
2020
Modular Robot Formation and Routing for Resilient Consensus Proceedings Article
In: 2020 American Control Conference (ACC), pp. 2464-2471, 2020.
Self-Reconfiguration in Response to Faults in Modular Aerial Systems Journal Article
In: IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 2522-2529, 2020.
2019

Design and Control of Aerial Modules for Inflight Self-Disassembly Journal Article
In: IEEE Robotics and Automation Letters, vol. 4, no. 4, pp. 3410-3417, 2019, ISSN: 2377-3766.
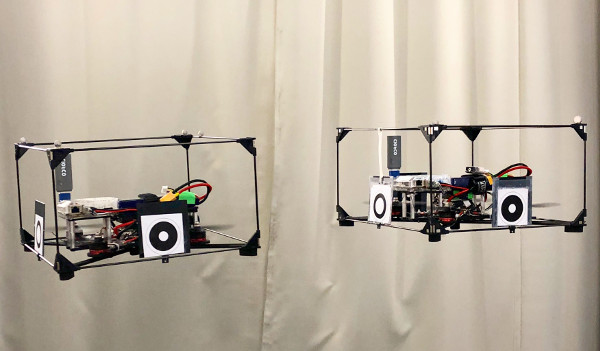
ModQuad-Vi: A Vision-Based Self-Assembling Modular Quadrotor Proceedings Article
In: 2019 International Conference on Robotics and Automation (ICRA), pp. 346-352, 2019.
2018

A Flying Gripper Based on Cuboid Modular Robots Proceedings Article
In: 2018 IEEE International Conference on Robotics and Automation (ICRA), pp. 7024-7030, 2018, ISSN: 2577-087X.
ModQuad: The Flying Modular Structure that Self-Assembles in Midair Proceedings Article
In: 2018 IEEE International Conference on Robotics and Automation (ICRA), pp. 691-698, 2018, ISSN: 2577-087X.

© 2021 SwarmsLab. All rights reserved