Journals
2021

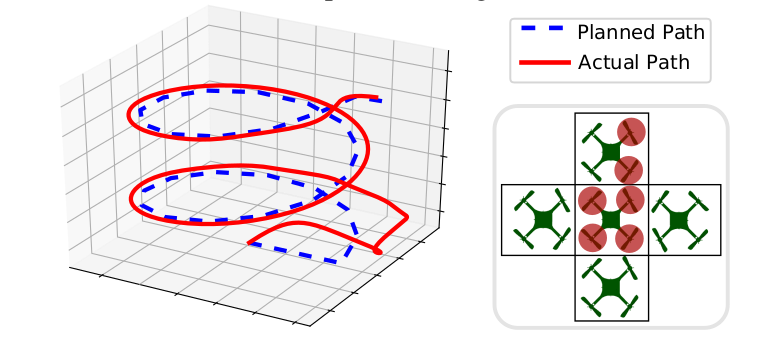
The Catenary Robot: Design and Control of a Cable Propelled by Two Quadrotors Journal Article
In: IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 3857-3863, 2021, ISSN: 2377-3766.
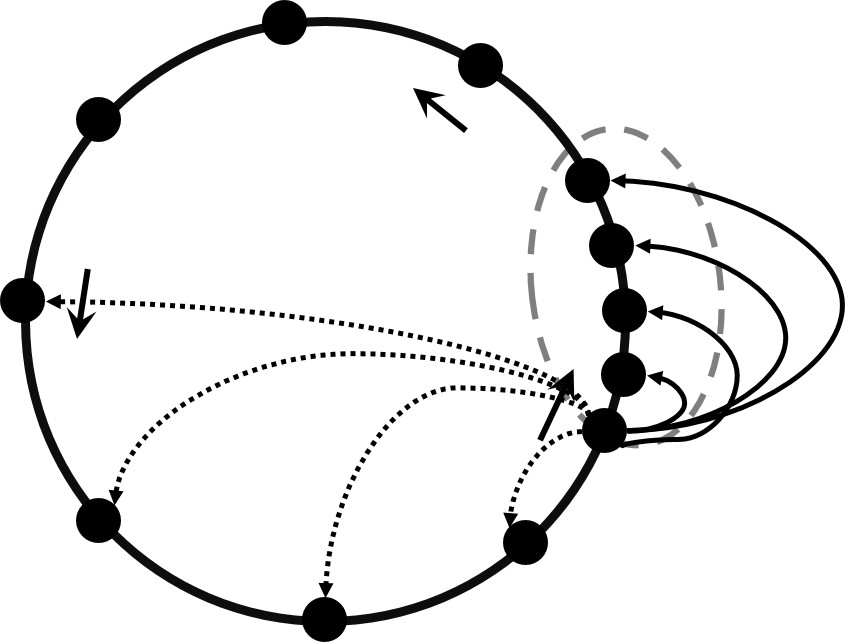
Resilient Consensus in Robot Swarms With Periodic Motion and Intermittent Communication Journal Article
In: IEEE Transactions on Robotics, 2021.

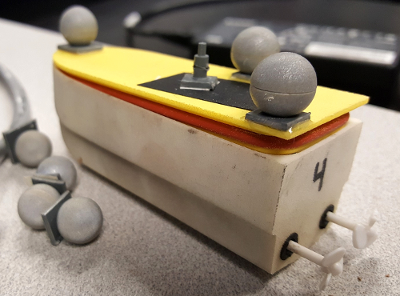
Vision-Based Self-Assembly for Modular Multirotor Structures Journal Article
In: IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 2202-2208, 2021.
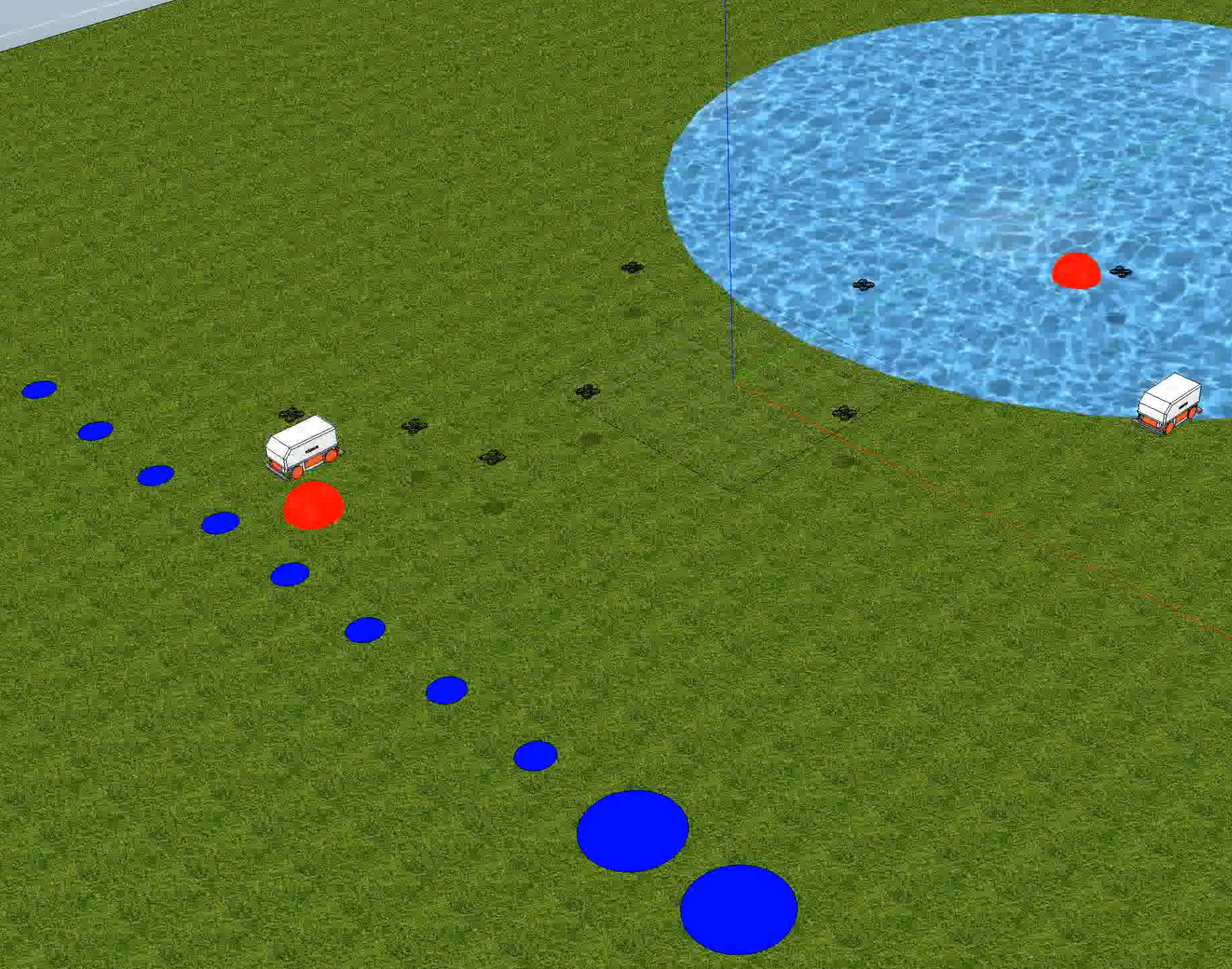
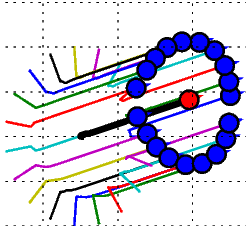
Estimating boundary dynamics using robotic sensor networks with pointwise measurements Journal Article
In: Autonomous Robots, vol. 45, no. 2, pp. 193–208, 2021.
Resilient Task Allocation in Heterogeneous Multi-Robot Systems Journal Article
In: IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 1327-1334, 2021.
2020
Self-Reconfiguration in Response to Faults in Modular Aerial Systems Journal Article
In: IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 2522-2529, 2020.
2019

Design and Control of Aerial Modules for Inflight Self-Disassembly Journal Article
In: IEEE Robotics and Automation Letters, vol. 4, no. 4, pp. 3410-3417, 2019, ISSN: 2377-3766.
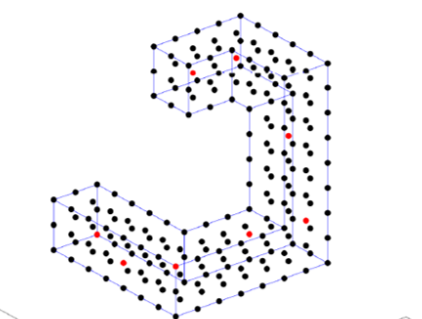
Design Guarantees for Resilient Robot Formations on Lattices Journal Article
In: IEEE Robotics and Automation Letters, vol. 4, no. 1, pp. 89-96, 2019, ISSN: 2377-3766.
2017
Resilient Flocking for Mobile Robot Teams Journal Article
In: IEEE Robotics and Automation Letters, vol. 2, no. 2, pp. 1039-1046, 2017.
2016
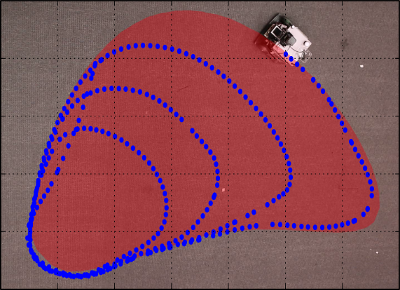
Predicting Environmental Boundary Behaviors With a Mobile Robot Journal Article
In: IEEE Robotics and Automation Letters, vol. 1, no. 2, pp. 1133-1139, 2016, ISSN: 2377-3766.

© 2021 SwarmsLab. All rights reserved