
About Me
I am Assistant Professor in Computer Science & Engineering at Lehigh University. Before joining Lehigh, I worked as a Post-Doctoral Researcher at the GRASP Laboratory, University of Pennsylvania, with Prof. Vijay Kumar.
I completed my PhD in Artifical Intelligence and Robotics, advised by Prof. Mario Fernando Campos , and Prof. Renato Assunção, in the Laboratory of Computer Vision and Robotics – VeRLab, Department of Computer Science at Federal University of Minas Gerais, Brazil.
Research Interests
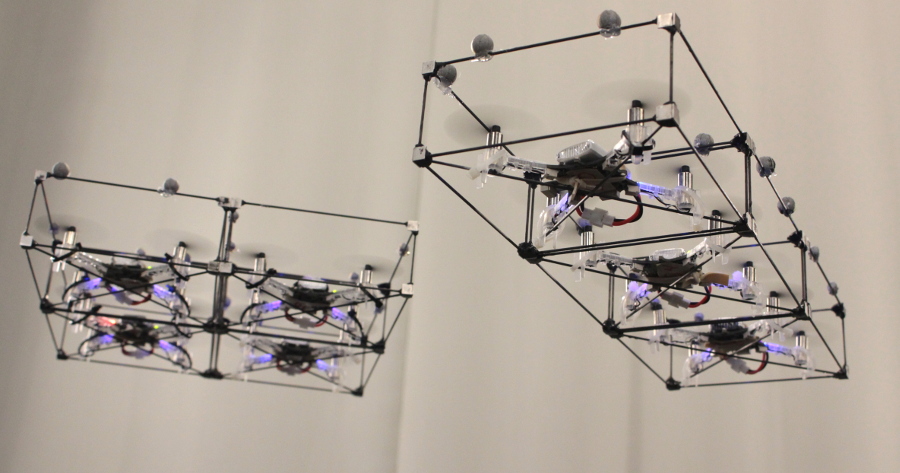
Flying Modular Robots
Multi-rotor systems, self-assembly algorithms, cooperative flying robots.
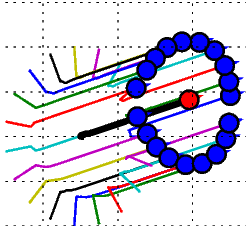
Environmental Monitoring
Prediction of environmental boundaries, Multi-robot coordination.
Resilient Robot Swarms
Robot Swarms, perimeter surveillance, resilient consensus.
Academic Timeline
- 2005 – 2010
B.Sc. in Engineering of Systems and Informatics Universidad Nacional de Colombia, Medellin, Colombia
- 2011 – 2012
M.Sc. in Engineering – Systems Engineering Universidad Nacional de Colombia, Medellin, Colombia
- 2013 – 2017
PhD. in Computer Science Laboratory of Computer Vision and Robotics – VeRLab
Federal University of Minas Gerais, Brazil
- 2015 – 2017
Visiting Reseach Scholar GRASP Laboratory University of Pennsylvania, USA
- 2017 – 2019
Post-Doctoral Researcher GRASP Laboratory University of Pennsylvania, USA
- 2019 – Present
Assistant Professor Computer Science & Engineering Lehigh University, USA
Publications
2019
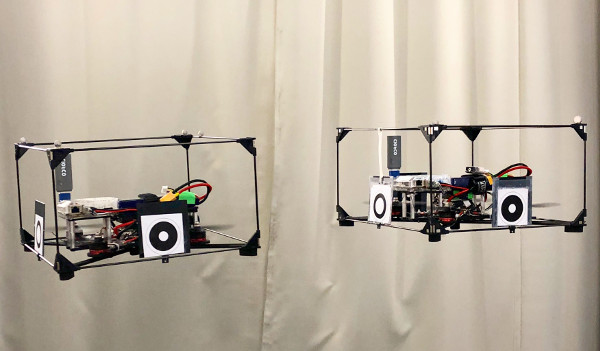
ModQuad-Vi: A Vision-Based Self-Assembling Modular Quadrotor Proceedings Article
In: 2019 International Conference on Robotics and Automation (ICRA), pp. 346-352, 2019.
2018
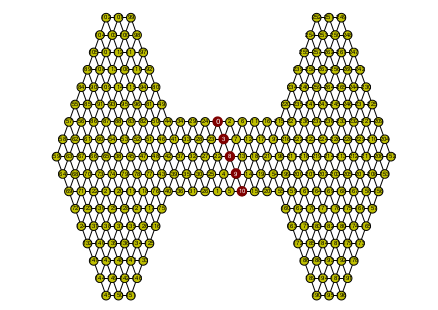
Resilient Backbones in Hexagonal Robot Formations Book Chapter
In: Distributed Autonomous Robotic Systems: The 14th International Symposium, pp. 427–440, Cham, 2018, ISBN: 978-3-030-05816-6.
ModQuad: The Flying Modular Structure that Self-Assembles in Midair Proceedings Article
In: 2018 IEEE International Conference on Robotics and Automation (ICRA), pp. 691-698, 2018, ISSN: 2577-087X.

A Flying Gripper Based on Cuboid Modular Robots Proceedings Article
In: 2018 IEEE International Conference on Robotics and Automation (ICRA), pp. 7024-7030, 2018, ISSN: 2577-087X.

Triangular Networks for Resilient Formations Book Chapter
In: Groß, Roderich; Kolling, Andreas; Berman, Spring; Frazzoli, Emilio; Martinoli, Alcherio; Matsuno, Fumitoshi; Gauci, Melvin (Ed.): Distributed Autonomous Robotic Systems: The 13th International Symposium, pp. 147–159, Springer International Publishing, Cham, 2018, ISBN: 978-3-319-73008-0.
2017
Resilient Flocking for Mobile Robot Teams Journal Article
In: IEEE Robotics and Automation Letters, vol. 2, no. 2, pp. 1039-1046, 2017.

Resilient consensus for time-varying networks of dynamic agents Proceedings Article
In: 2017 American Control Conference (ACC), pp. 252-258, 2017.
Distributed multi-robot coordination for dynamic perimeter surveillance in uncertain environments Proceedings Article
In: 2017 IEEE International Conference on Robotics and Automation (ICRA), pp. 273-278, 2017.

A decentralized algorithm for assembling structures with modular robots Proceedings Article
In: 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 2736-2743, 2017.

Cooperative prediction of time-varying boundaries with a team of robots Proceedings Article
In: 2017 International Symposium on Multi-Robot and Multi-Agent Systems (MRS), pp. 9-16, 2017.

© 2021 SwarmsLab. All rights reserved