
About Me
He is a Ph.D. Student in Computer Science & Engineering at Lehigh University under the supervision of Prof. David Saldaña. He belongs to Swarms lab and Autonomous and Intelligent Robotics Laboratory AIRLab at Lehigh University. He is a candidate to earn an MSc. in control engineering at the University of Ibague, Colombia, under the direction of Prof. Oswaldo Lopez.
During my master’s degree, I was chair of the IEEE student branch chapter and chair industrial application society at the University of Ibague.
Research Interests
Multi-rotor systems, self-assembly algorithms, cooperative flying robots.
Manipulation with deformable objects
Robot motion planning
Academic Timeline
- Aug 2022 – present
Ph.D. Student – Research assistant - Feb 2020 – Aug 2021
Visiting research scholar – Lehigh University, US - Sep 2019 – Jan 2020
Visiting research scholar – Universidad Federico Santa Maria, CL - Feb 2019 – Aug 2019
Instructor – Universidad de Ibague - Jul 2017 – Dec 2019
Research assistant master student - May 2016 – Feb 2017
Research assistant student - Jul 2012 – Jan 2015
Engineering and innovation department manager
Publications
2023

SBlimp: Design, Model, and Translational Motion Control for a Swing-Blimp Proceedings Article
In: 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023), IEEE Robotics and Automation Society 2023.

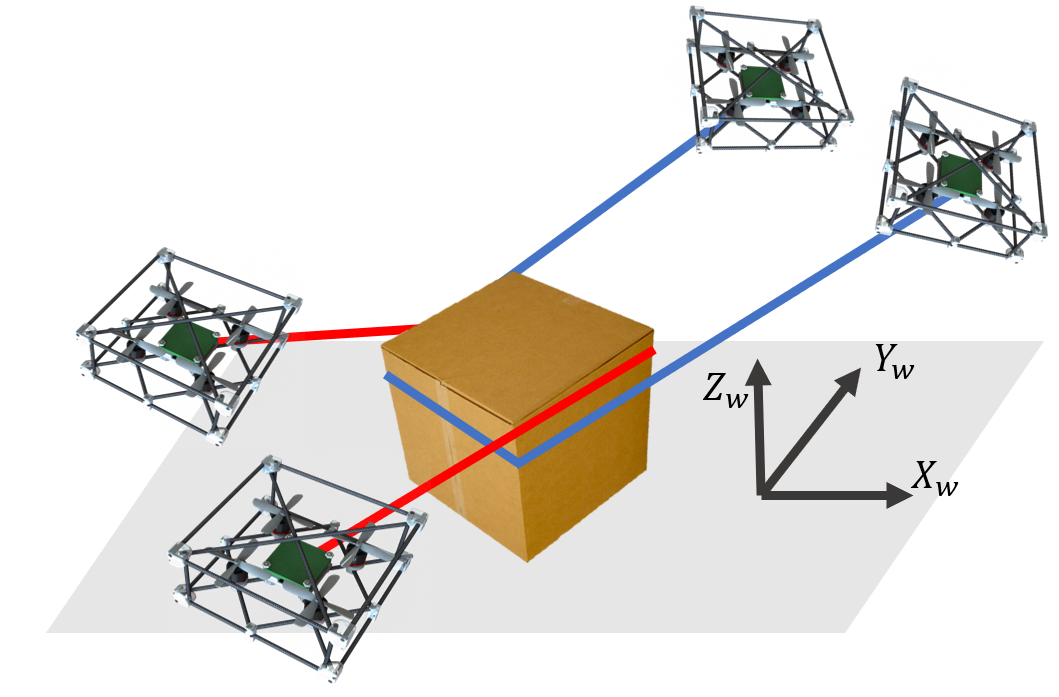
Forming and Controlling Hitches in Midair Using Aerial Robots Proceedings Article
In: 2023 IEEE International Conference on Robotics and Automation (ICRA 2023), 2023.
2022
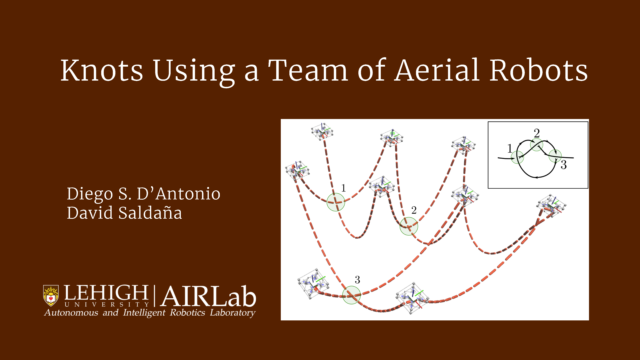
Folding Knots Using a Team of Aerial Robots Proceedings Article
In: 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 3372-3377, 2022.
2021
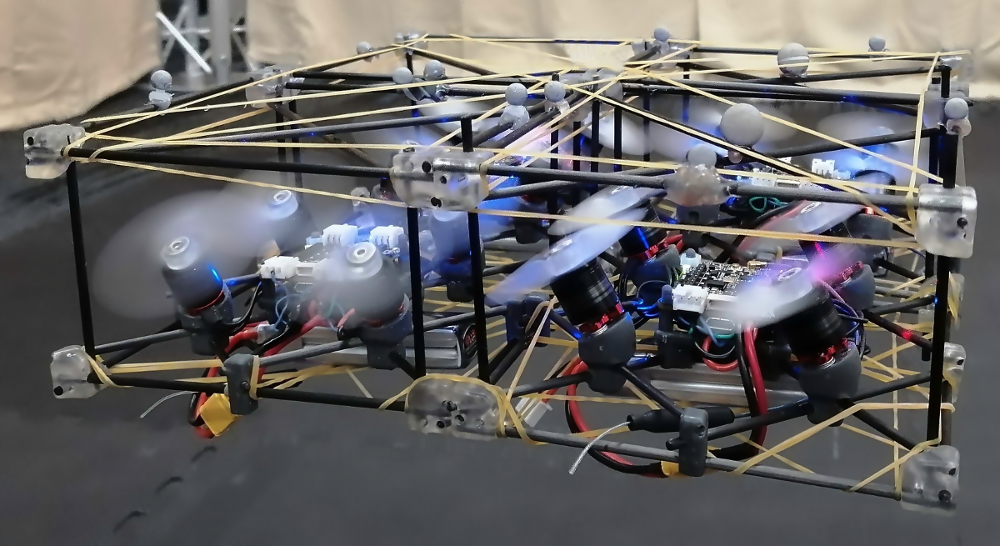
H-ModQuad: Modular Multi-Rotors with 4, 5, and 6 Controllable DOF Proceedings Article
In: 2021 IEEE International Conference on Robotics and Automation (ICRA), 2021, ISBN: 978-1-7281-9077-8.
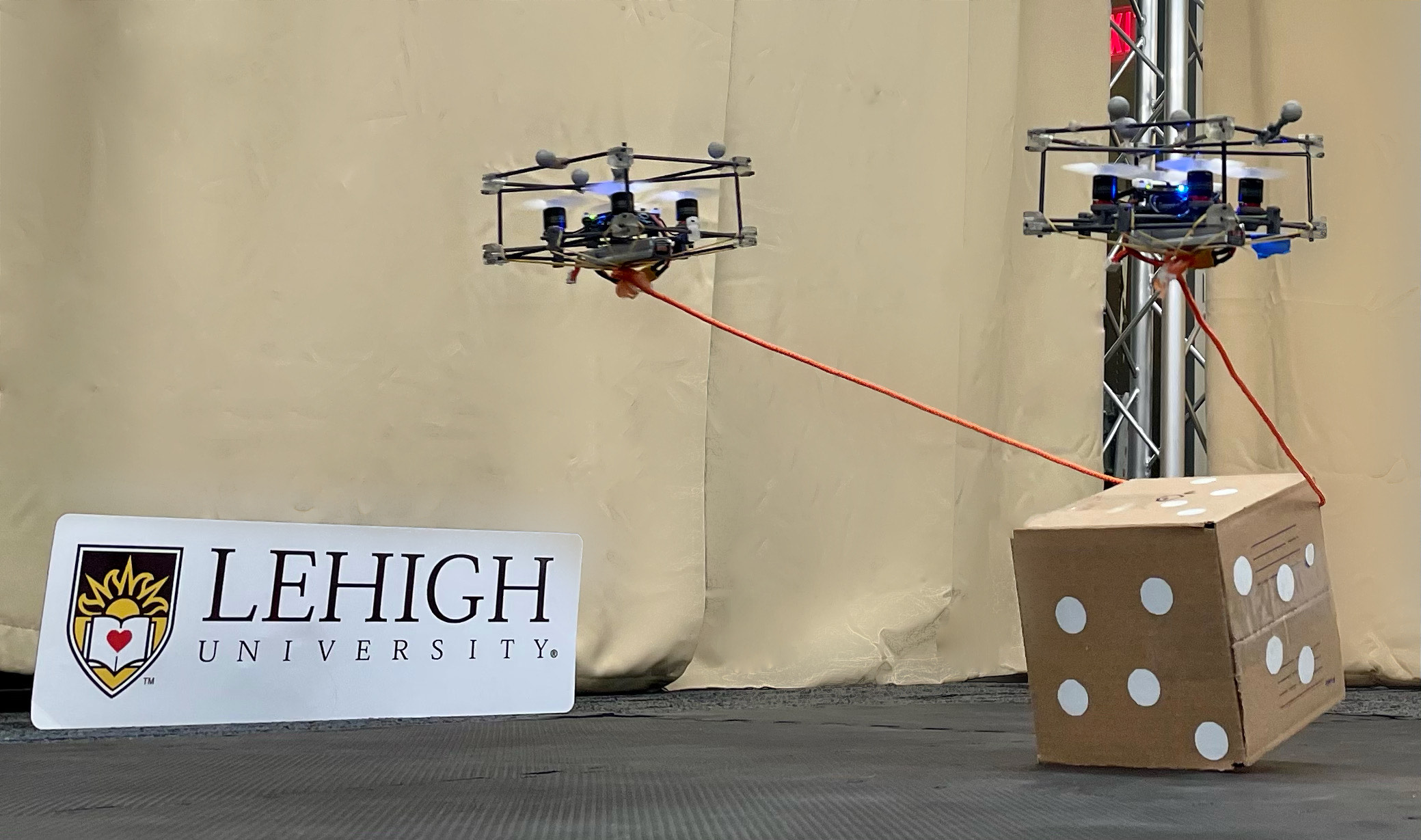
Non-Prehensile Manipulation of Cuboid Objects Using a Catenary Robot Proceedings Article
In: 2021.

The Catenary Robot: Design and Control of a Cable Propelled by Two Quadrotors Journal Article
In: IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 3857-3863, 2021, ISSN: 2377-3766.
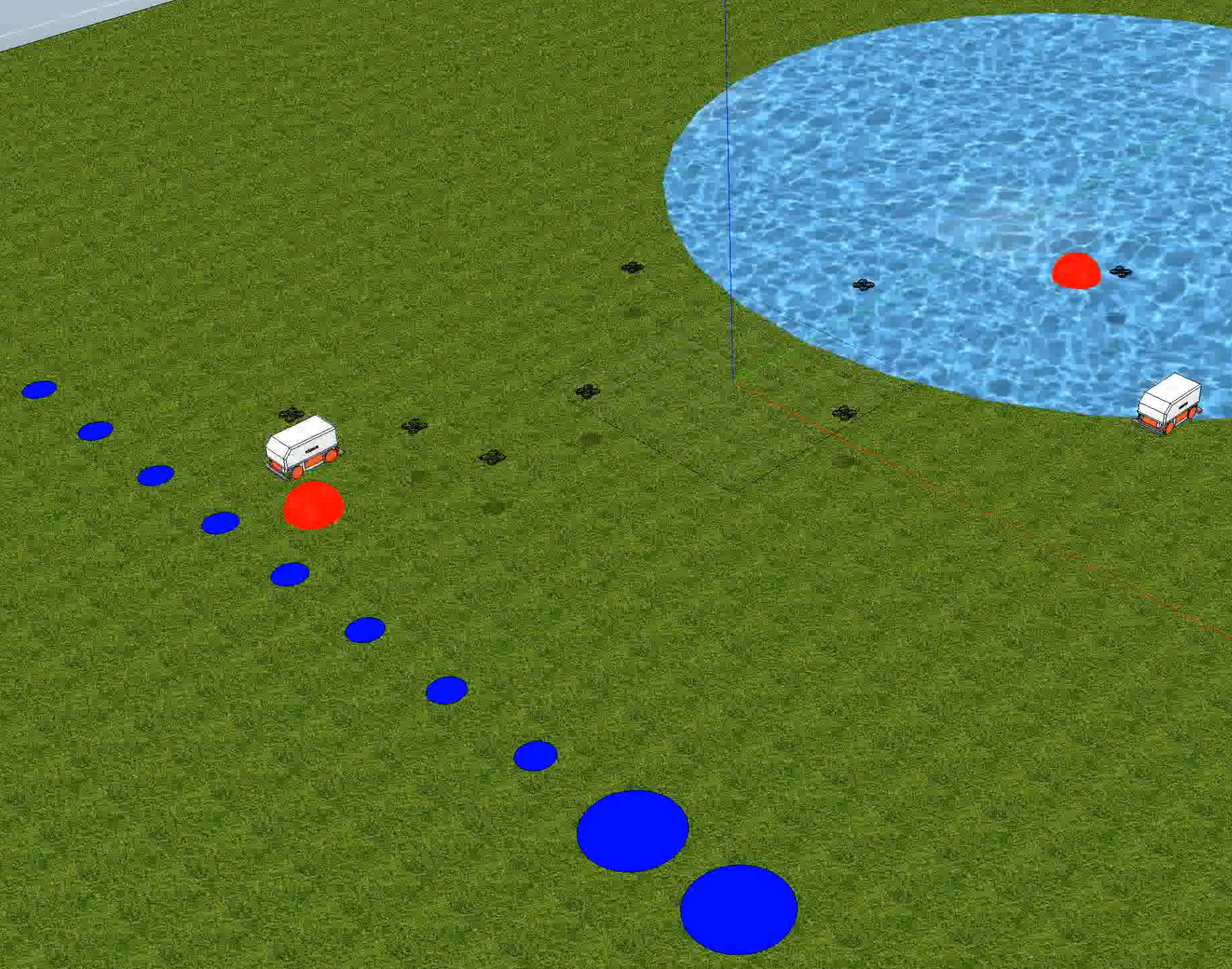
Resilient Task Allocation in Heterogeneous Multi-Robot Systems Journal Article
In: IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 1327-1334, 2021.
Adaptive Control for Cooperative Aerial Transportation Using Catenary Robots Proceedings Article
In: 2021 Aerial Robotic Systems Physically Interacting with the Environment (AIRPHARO), pp. 1-8, 2021.

© 2021 SwarmsLab. All rights reserved