
About Me
I am Assistant Professor in Computer Science & Engineering at Lehigh University. Before joining Lehigh, I worked as a Post-Doctoral Researcher at the GRASP Laboratory, University of Pennsylvania, with Prof. Vijay Kumar.
I completed my PhD in Artifical Intelligence and Robotics, advised by Prof. Mario Fernando Campos , and Prof. Renato Assunção, in the Laboratory of Computer Vision and Robotics – VeRLab, Department of Computer Science at Federal University of Minas Gerais, Brazil.
Research Interests
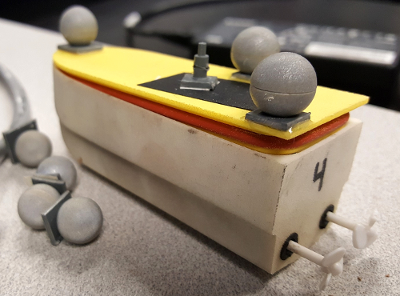
Flying Modular Robots
Multi-rotor systems, self-assembly algorithms, cooperative flying robots.
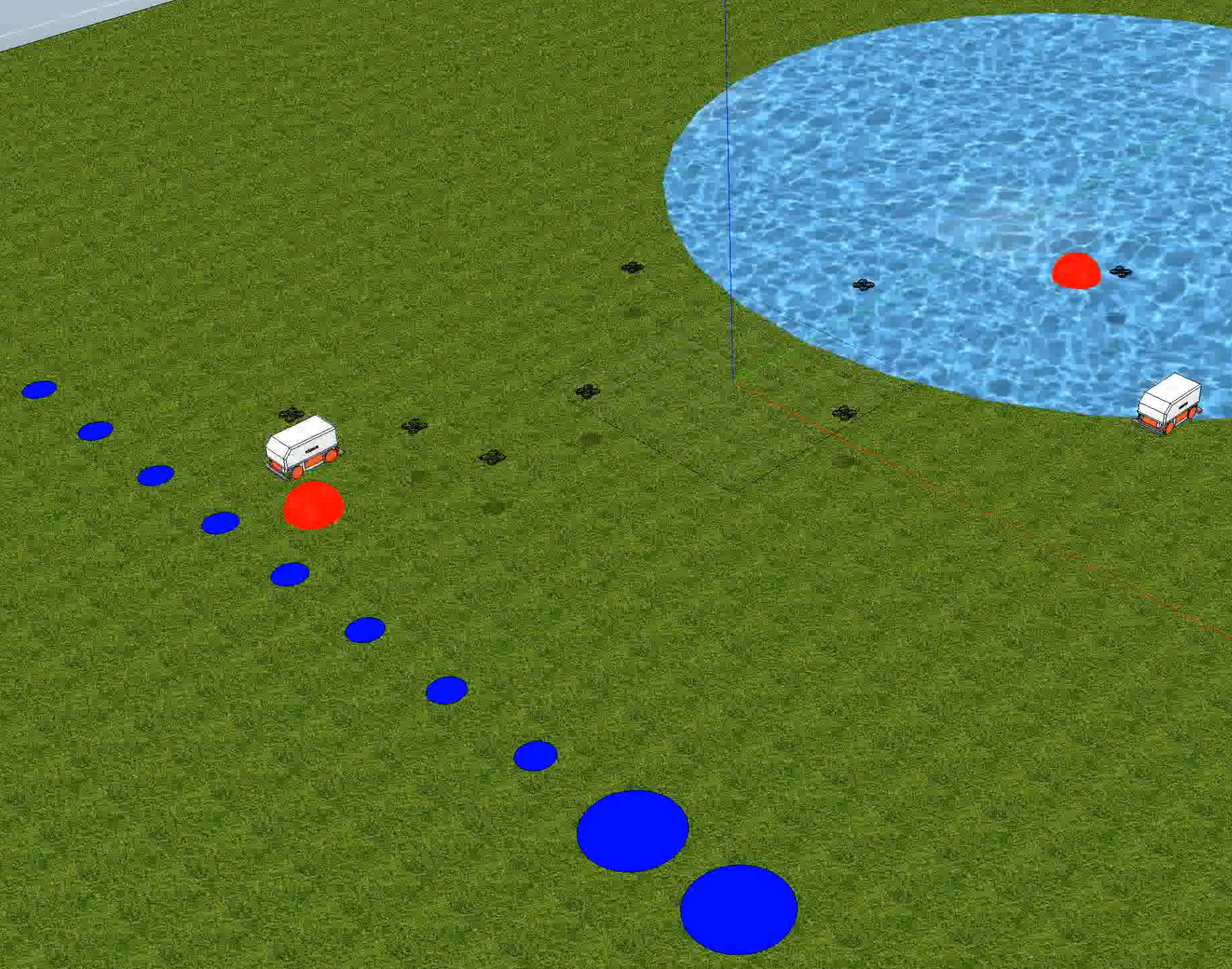
Environmental Monitoring
Prediction of environmental boundaries, Multi-robot coordination.
Resilient Robot Swarms
Robot Swarms, perimeter surveillance, resilient consensus.
Academic Timeline
- 2005 – 2010
B.Sc. in Engineering of Systems and Informatics Universidad Nacional de Colombia, Medellin, Colombia
- 2011 – 2012
M.Sc. in Engineering – Systems Engineering Universidad Nacional de Colombia, Medellin, Colombia
- 2013 – 2017
PhD. in Computer Science Laboratory of Computer Vision and Robotics – VeRLab
Federal University of Minas Gerais, Brazil
- 2015 – 2017
Visiting Reseach Scholar GRASP Laboratory University of Pennsylvania, USA
- 2017 – 2019
Post-Doctoral Researcher GRASP Laboratory University of Pennsylvania, USA
- 2019 – Present
Assistant Professor Computer Science & Engineering Lehigh University, USA
Publications
2021

Vision-Based Self-Assembly for Modular Multirotor Structures Journal Article
In: IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 2202-2208, 2021.
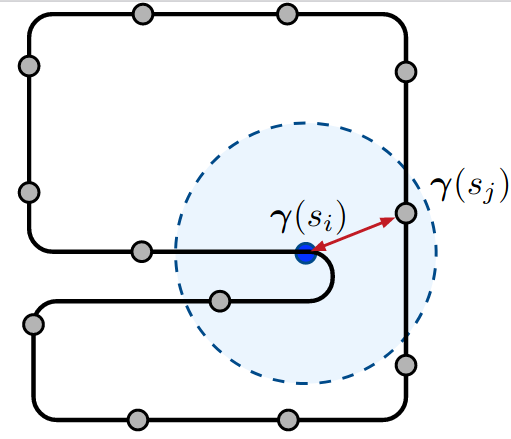
Estimating boundary dynamics using robotic sensor networks with pointwise measurements Journal Article
In: Autonomous Robots, vol. 45, no. 2, pp. 193–208, 2021.
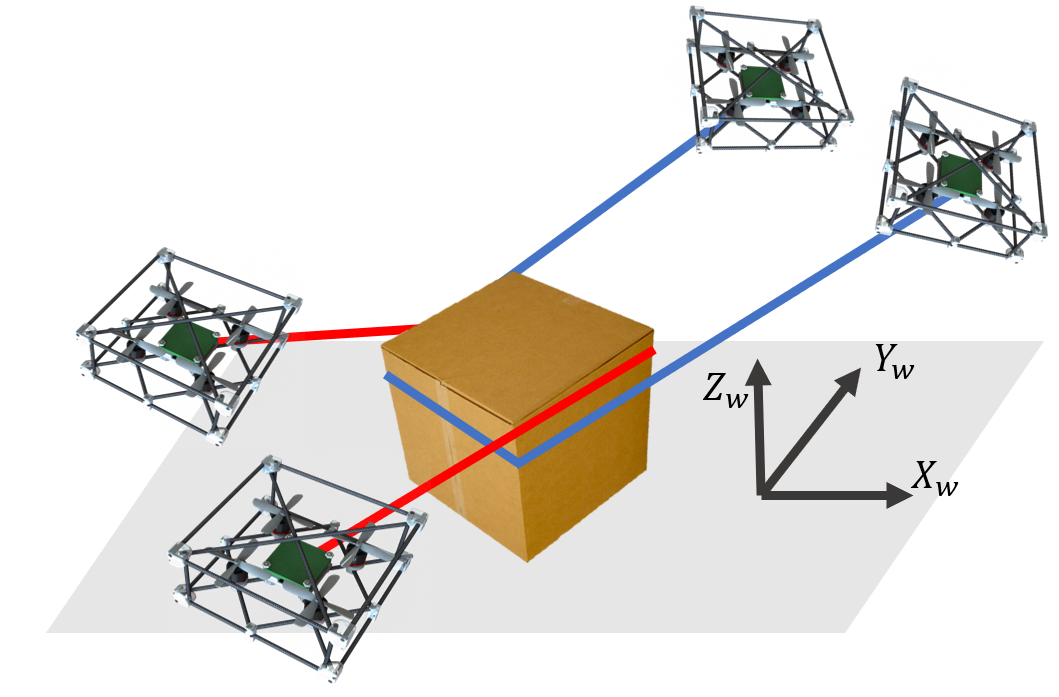
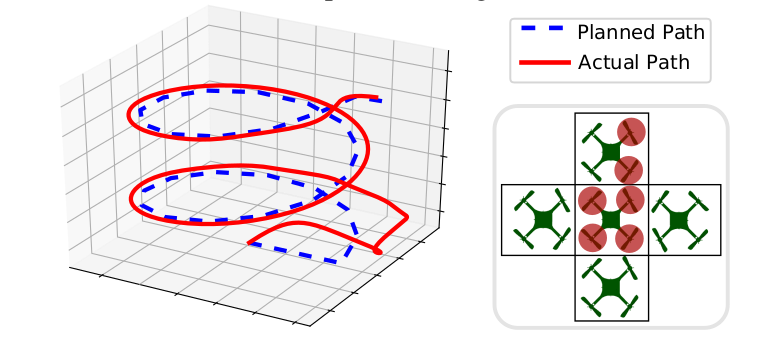
Adaptive Control for Cooperative Aerial Transportation Using Catenary Robots Proceedings Article
In: 2021 Aerial Robotic Systems Physically Interacting with the Environment (AIRPHARO), pp. 1-8, 2021.
Resilient Task Allocation in Heterogeneous Multi-Robot Systems Journal Article
In: IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 1327-1334, 2021.
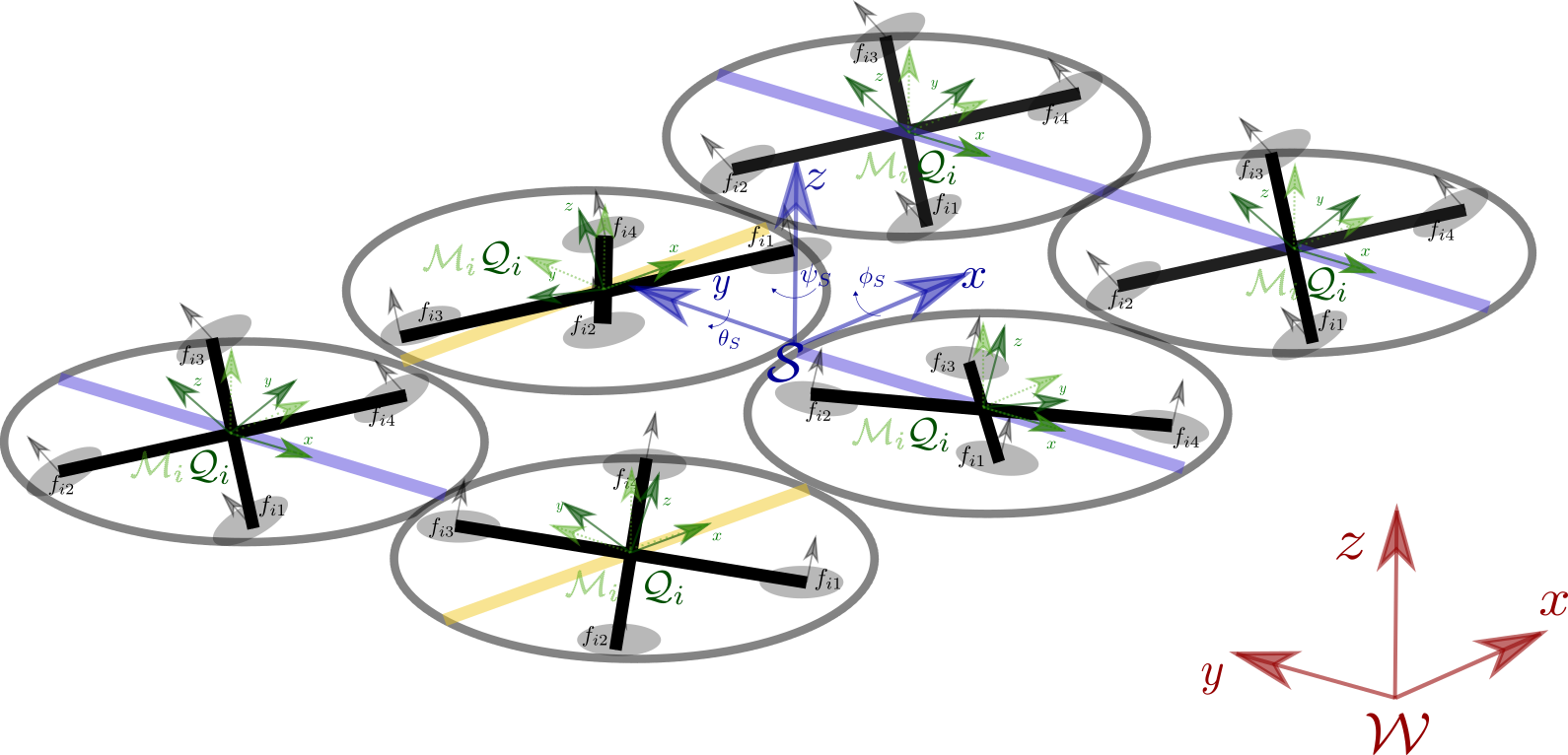
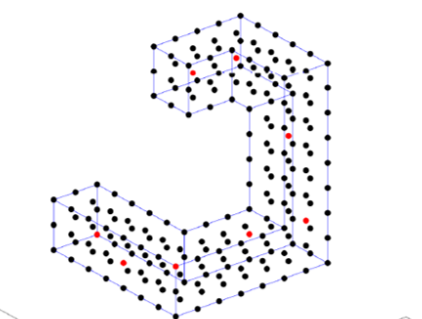
Finding Structure Configurations for Flying Modular Robots Proceedings Article
In: 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 6970-6976, 2021.
2020
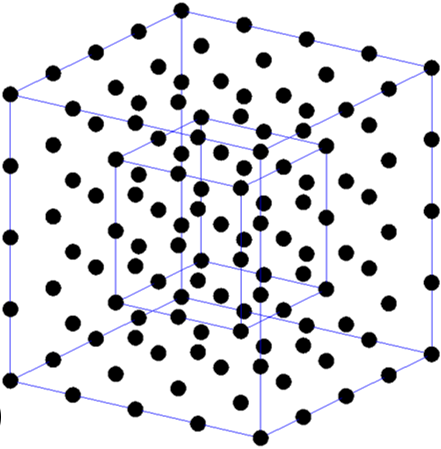
Dense r-robust formations on lattices Proceedings Article
In: 2020 IEEE International Conference on Robotics and Automation (ICRA), pp. 6633-6639, 2020.
Modular Robot Formation and Routing for Resilient Consensus Proceedings Article
In: 2020 American Control Conference (ACC), pp. 2464-2471, 2020.
Self-Reconfiguration in Response to Faults in Modular Aerial Systems Journal Article
In: IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 2522-2529, 2020.
2019

Design and Control of Aerial Modules for Inflight Self-Disassembly Journal Article
In: IEEE Robotics and Automation Letters, vol. 4, no. 4, pp. 3410-3417, 2019, ISSN: 2377-3766.
Design Guarantees for Resilient Robot Formations on Lattices Journal Article
In: IEEE Robotics and Automation Letters, vol. 4, no. 1, pp. 89-96, 2019, ISSN: 2377-3766.

© 2021 SwarmsLab. All rights reserved