Publications
2023
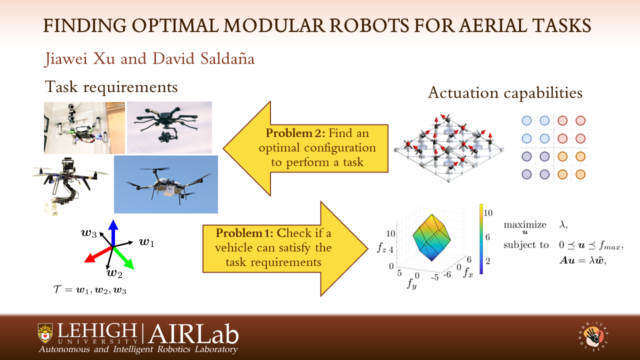
Finding Optimal Modular Robots for Aerial Tasks Proceedings Article Forthcoming
In: 40th IEEE International Conference on Robotics and Automation, IEEE Robotics and Automation Society Forthcoming.
2021
Estimating boundary dynamics using robotic sensor networks with pointwise measurements Journal Article
In: Autonomous Robots, vol. 45, no. 2, pp. 193–208, 2021.
2017
Distributed multi-robot coordination for dynamic perimeter surveillance in uncertain environments Proceedings Article
In: 2017 IEEE International Conference on Robotics and Automation (ICRA), pp. 273-278, 2017.
2016
Predicting Environmental Boundary Behaviors With a Mobile Robot Journal Article
In: IEEE Robotics and Automation Letters, vol. 1, no. 2, pp. 1133-1139, 2016, ISSN: 2377-3766.

Dynamic perimeter surveillance with a team of robots Proceedings Article
In: 2016 IEEE International Conference on Robotics and Automation (ICRA), pp. 5289-5294, 2016.
2015
Detecting Latent Variables of Interest in Geo-localized Environments Using an Aerial Robot Proceedings Article
In: Proceedings of the Brazilian Robotics Symposium and Latin American Robotics Symposium (SBR-LARS), 2015.
Searching for Regions Out of Normal Conditions Using a Team of Robots Proceedings Article
In: Ösorio, Fernando S.; Wolf, Denis Fernando; Branco, Kalinka Castelo; Jr., Valdir Grassi; Becker, Marcelo; Romero, Roseli" (Ed.): Robotics, pp. 1–15, Springer Berlin Heidelberg, Berlin, Heidelberg, 2015, ISBN: 978-3-662-48134-9.
2014

© 2021 SwarmsLab. All rights reserved