Publications
2021
Cardona, Gustavo A.; D’Antonio, Diego S.; Vasile, Cristian-Ioan; Saldaña, David
Non-Prehensile Manipulation of Cuboid Objects Using a Catenary Robot Proceedings Article
In: 2021.
Abstract | BibTeX | Tags: aerial manipulation, aerial robot, cable, catenary robot, quadrotor | Links:
@inproceedings{nokey,
title = {Non-Prehensile Manipulation of Cuboid Objects Using a Catenary Robot},
author = {Gustavo A. Cardona and Diego S. D’Antonio and Cristian-Ioan Vasile and David Saldaña},
url = {https://youtu.be/Ou6DPlXPE7A},
year = {2021},
date = {2021-08-13},
urldate = {2021-08-13},
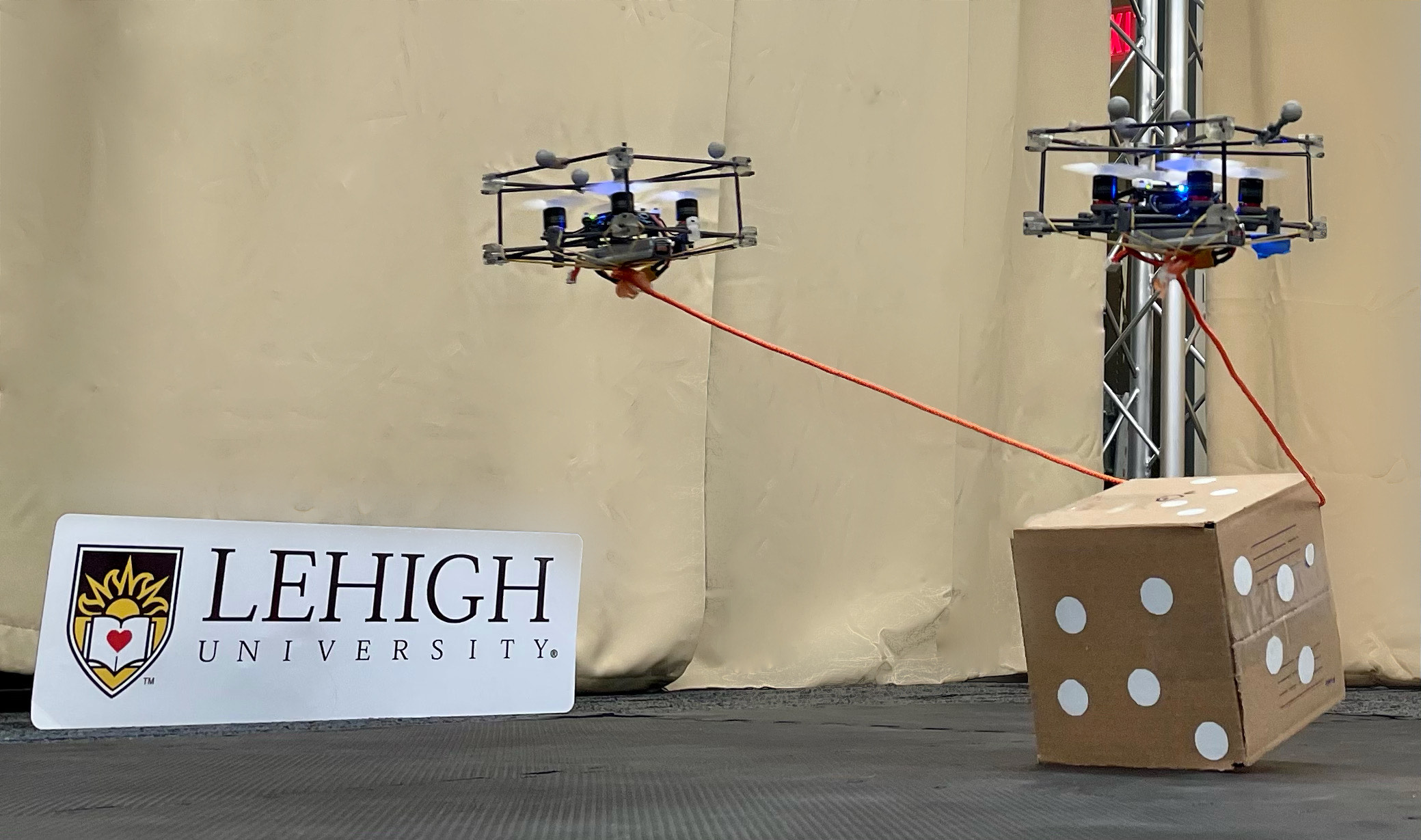
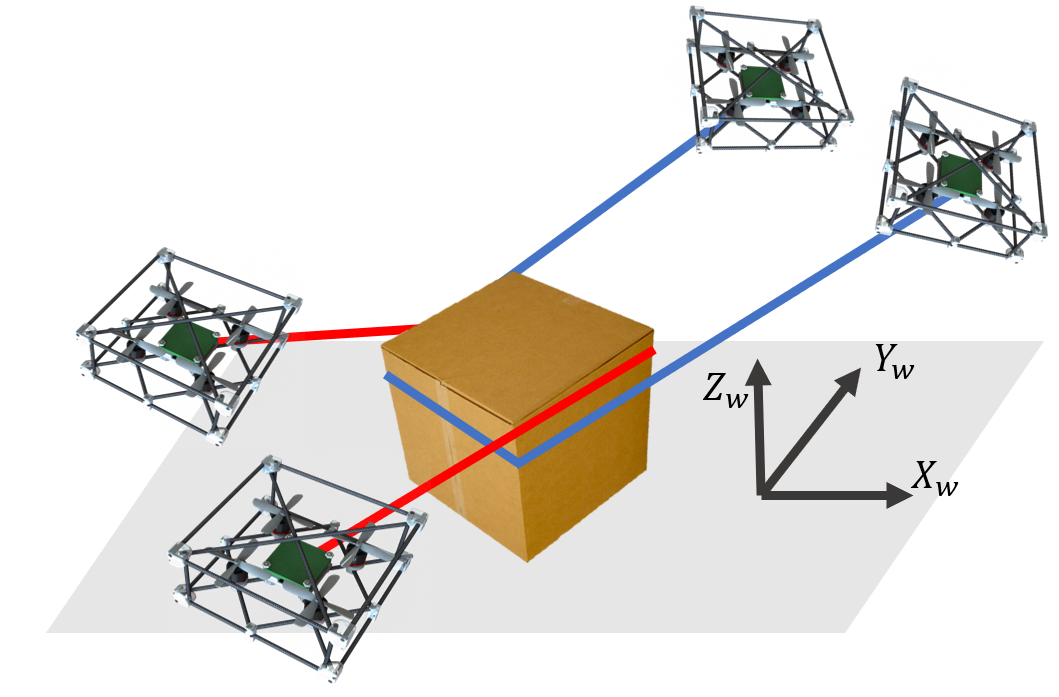
abstract = {Transporting objects using quadrotors with cables has been widely studied in the literature. However, most of those approaches assume that the cables are previously attached to the load by human intervention. In tasks where multiple objects need to be moved, the efficiency of the robotic system is constrained by the requirement of manual labor. Our approach uses a non-stretchable cable connected to two quadrotors, which we call the catenary robot, that fully automates the transportation task. Using the cable, we can roll and drag the cuboid object (box) on planar surfaces. Depending on the surface type, we choose the proper action, dragging for low friction, and rolling for high friction. Therefore, the transportation process does not require any human intervention as we use the cable to interact with the box without requiring fastening. We validate our control design in simulation and with actual robots, where we show them rolling and dragging boxes to track desired trajectories.},
keywords = {aerial manipulation, aerial robot, cable, catenary robot, quadrotor},
pubstate = {published},
tppubtype = {inproceedings}
}
Transporting objects using quadrotors with cables has been widely studied in the literature. However, most of those approaches assume that the cables are previously attached to the load by human intervention. In tasks where multiple objects need to be moved, the efficiency of the robotic system is constrained by the requirement of manual labor. Our approach uses a non-stretchable cable connected to two quadrotors, which we call the catenary robot, that fully automates the transportation task. Using the cable, we can roll and drag the cuboid object (box) on planar surfaces. Depending on the surface type, we choose the proper action, dragging for low friction, and rolling for high friction. Therefore, the transportation process does not require any human intervention as we use the cable to interact with the box without requiring fastening. We validate our control design in simulation and with actual robots, where we show them rolling and dragging boxes to track desired trajectories.

D’Antonio, Diego S.; Cardona, Gustavo A.; Saldaña, David
The Catenary Robot: Design and Control of a Cable Propelled by Two Quadrotors Journal Article
In: IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 3857-3863, 2021, ISSN: 2377-3766.
Abstract | BibTeX | Tags: aerial manipulation, aerial robot, cable, catenary robot, quadrotor | Links:
@article{,
title = {The Catenary Robot: Design and Control of a Cable Propelled by Two Quadrotors},
author = {Diego S. D’Antonio and Gustavo A. Cardona and David Saldaña },
url = {https://youtu.be/3SaKKjl6os0},
doi = {10.1109/LRA.2021.3062603},
issn = {2377-3766},
year = {2021},
date = {2021-02-26},
urldate = {2021-02-26},
journal = {IEEE Robotics and Automation Letters},
volume = {6},
number = {2},
pages = {3857-3863},
abstract = {Transporting objects using aerial robots has been widely studied in the literature. Still, those approaches always assume that the connection between the quadrotor and the load is made in a previous stage. However, that previous stage usually requires human intervention, and autonomous procedures to locate and attach the object are not considered. Additionally, most of the approaches assume cables as rigid links, but manipulating cables requires considering the state when the cables are hanging. In this work, we design and control a catenary robot. Our robot is able to transport hook-shaped objects in the environment. The robotic system is composed of two quadrotors attached to the two ends of a cable. By defining the catenary curve with five degrees of freedom, position in 3-D, orientation in z-axis, and span, we can drive the two quadrotors to track a given trajectory. We validate our approach with simulations and real robots. We present four different scenarios of experiments. Our numerical solution is computationally fast and can be executed in real-time.},
keywords = {aerial manipulation, aerial robot, cable, catenary robot, quadrotor},
pubstate = {published},
tppubtype = {article}
}
Transporting objects using aerial robots has been widely studied in the literature. Still, those approaches always assume that the connection between the quadrotor and the load is made in a previous stage. However, that previous stage usually requires human intervention, and autonomous procedures to locate and attach the object are not considered. Additionally, most of the approaches assume cables as rigid links, but manipulating cables requires considering the state when the cables are hanging. In this work, we design and control a catenary robot. Our robot is able to transport hook-shaped objects in the environment. The robotic system is composed of two quadrotors attached to the two ends of a cable. By defining the catenary curve with five degrees of freedom, position in 3-D, orientation in z-axis, and span, we can drive the two quadrotors to track a given trajectory. We validate our approach with simulations and real robots. We present four different scenarios of experiments. Our numerical solution is computationally fast and can be executed in real-time.
Cardona, Gustavo A.; D’Antonio, Diego S.; Fierro, Rafael; Saldaña, David
Adaptive Control for Cooperative Aerial Transportation Using Catenary Robots Proceedings Article
In: 2021 Aerial Robotic Systems Physically Interacting with the Environment (AIRPHARO), pp. 1-8, 2021.
BibTeX | Tags: aerial manipulation, aerial robot, cable, catenary robot, quadrotor | Links:
@inproceedings{9571068,
title = {Adaptive Control for Cooperative Aerial Transportation Using Catenary Robots},
author = {Gustavo A. Cardona and Diego S. D’Antonio and Rafael Fierro and David Saldaña},
url = {https://youtu.be/MeEGL_PUBx4},
doi = {10.1109/AIRPHARO52252.2021.9571068},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
booktitle = {2021 Aerial Robotic Systems Physically Interacting with the Environment (AIRPHARO)},
pages = {1-8},
keywords = {aerial manipulation, aerial robot, cable, catenary robot, quadrotor},
pubstate = {published},
tppubtype = {inproceedings}
}

© 2021 SwarmsLab. All rights reserved