Publications
2023

Xu, Jiawei; Ammirato, Dominic J; D’Antonio, Diego S.; Saldaña, David
SBlimp: Design, Model, and Translational Motion Control for a Swing-Blimp Proceedings Article
In: 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023), IEEE Robotics and Automation Society 2023.
Abstract | BibTeX | Tags: aerial robot, blimp, control | Links:
@inproceedings{xu2023sblimp,
title = {SBlimp: Design, Model, and Translational Motion Control for a Swing-Blimp},
author = {Jiawei Xu and Dominic J Ammirato and Diego S. D’Antonio and David Saldaña},
url = {https://www.researchgate.net/publication/372785641_SBlimp_Design_Model_and_Translational_Motion_Control_for_a_Swing-Blimp},
doi = {arXiv:2308.00259},
year = {2023},
date = {2023-10-01},
urldate = {2023-10-01},
booktitle = {2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2023)},
organization = {IEEE Robotics and Automation Society},
abstract = {We present an aerial vehicle composed of a custom quadrotor with tilted rotors and a helium balloon, called SBlimp. We propose a novel control strategy that takes advantage of the natural stable attitude of the blimp to control translational motion. Different from cascade controllers in the literature that controls attitude to achieve desired translational motion, our approach directly controls the linear velocity regardless of the heading orientation of the vehicle. As a result, the vehicle swings during the translational motion. We provide a planar analysis of the dynamic model, demonstrating stability for our controller. Our design is evaluated in numerical simulations with different physical factors and validated with experiments using a real-world prototype, showing that the SBlimp is able to achieve stable translation regardless of its orientation.},
keywords = {aerial robot, blimp, control},
pubstate = {published},
tppubtype = {inproceedings}
}
We present an aerial vehicle composed of a custom quadrotor with tilted rotors and a helium balloon, called SBlimp. We propose a novel control strategy that takes advantage of the natural stable attitude of the blimp to control translational motion. Different from cascade controllers in the literature that controls attitude to achieve desired translational motion, our approach directly controls the linear velocity regardless of the heading orientation of the vehicle. As a result, the vehicle swings during the translational motion. We provide a planar analysis of the dynamic model, demonstrating stability for our controller. Our design is evaluated in numerical simulations with different physical factors and validated with experiments using a real-world prototype, showing that the SBlimp is able to achieve stable translation regardless of its orientation.
Xu, Jiawei; Saldaña, David
Finding Optimal Modular Robots for Aerial Tasks Proceedings Article Forthcoming
In: 40th IEEE International Conference on Robotics and Automation, IEEE Robotics and Automation Society Forthcoming.
Abstract | BibTeX | Tags: aerial robot, computational geometry, modular robots, multi-robot system, optimization | Links:
@inproceedings{jiaweixu2023finding,
title = {Finding Optimal Modular Robots for Aerial Tasks},
author = {Jiawei Xu and David Saldaña},
url = {https://www.youtube.com/watch?v=JtSZSkYx_Rg,
http://swarmslab.com/wp-content/uploads/2023/05/Finding-Optimal-Modular-Robots-for-Aerial-Tasks.pdf},
year = {2023},
date = {2023-05-29},
urldate = {2023-05-29},
booktitle = {40th IEEE International Conference on Robotics and Automation},
organization = {IEEE Robotics and Automation Society},
series = {IEEE International Conference on Robotics and Automation},
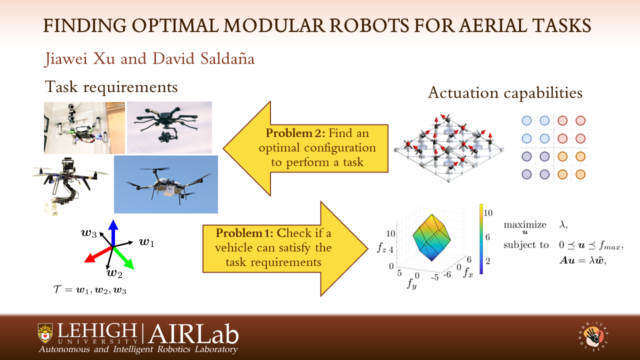
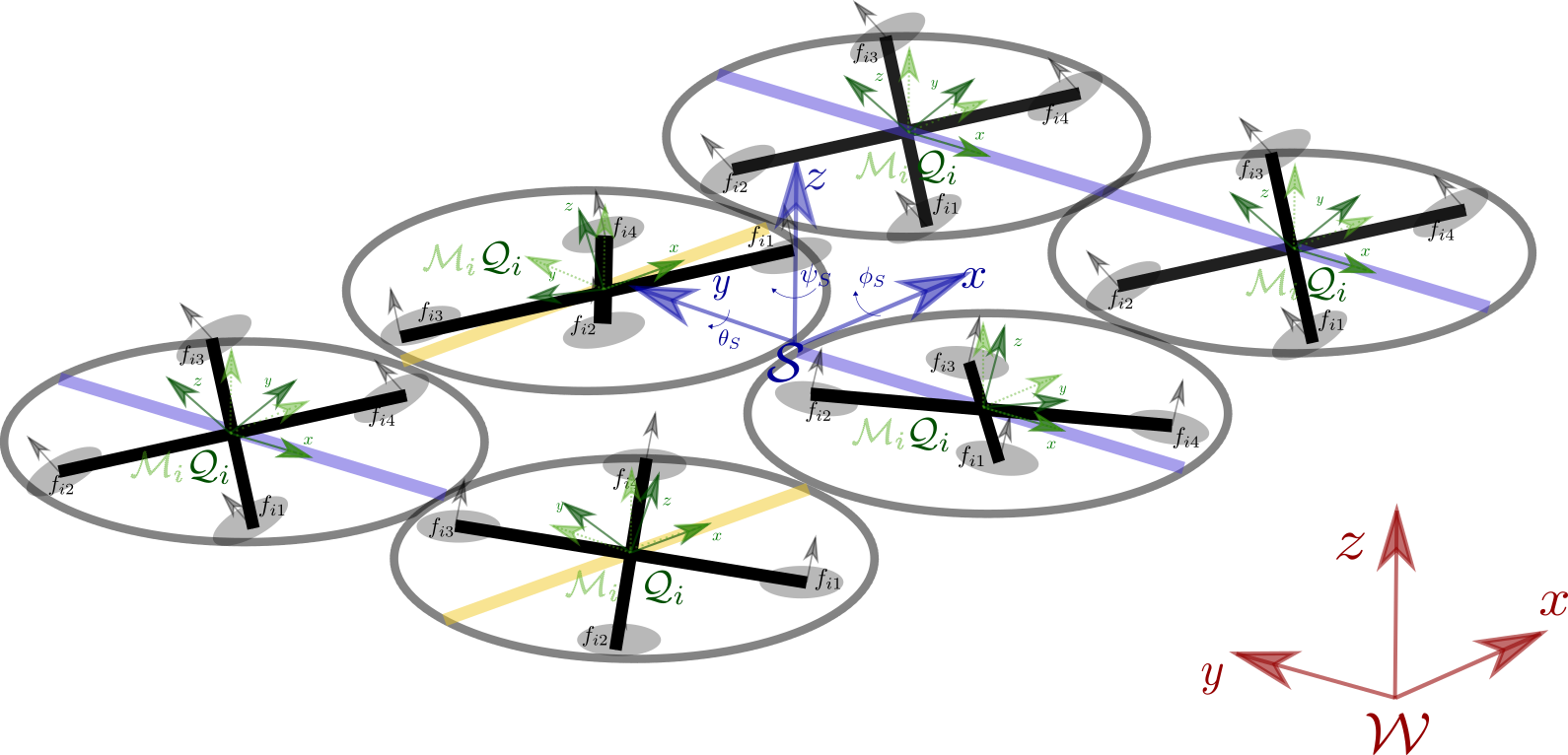
abstract = {Traditional aerial vehicles have limitations in their capabilities due to actuator constraints, such as motor saturation. The hardware components and their arrangement are designed to satisfy specific requirements and are difficult to modify during operation. To address this problem, we introduce a versatile modular multi-rotor vehicle that can change its capabilities by reconfiguration. Our modular robot consists of homogeneous cuboid modules, propelled by quadrotors with tilted rotors. Depending on the number of modules and their configuration, the robot can expand its actuation capabilities. In this paper, we build a mathematical model for the actuation capability of a modular multi-rotor vehicle and develop methods to determine if a vehicle is capable of satisfying a task requirement. Based on this result, we find the optimal configurations for a given task. Our approach is validated in realistic 3D simulations, showing that our modular system can adapt to tasks with varying requirements.},
keywords = {aerial robot, computational geometry, modular robots, multi-robot system, optimization},
pubstate = {forthcoming},
tppubtype = {inproceedings}
}
Traditional aerial vehicles have limitations in their capabilities due to actuator constraints, such as motor saturation. The hardware components and their arrangement are designed to satisfy specific requirements and are difficult to modify during operation. To address this problem, we introduce a versatile modular multi-rotor vehicle that can change its capabilities by reconfiguration. Our modular robot consists of homogeneous cuboid modules, propelled by quadrotors with tilted rotors. Depending on the number of modules and their configuration, the robot can expand its actuation capabilities. In this paper, we build a mathematical model for the actuation capability of a modular multi-rotor vehicle and develop methods to determine if a vehicle is capable of satisfying a task requirement. Based on this result, we find the optimal configurations for a given task. Our approach is validated in realistic 3D simulations, showing that our modular system can adapt to tasks with varying requirements.

D’Antonio, Diego S.; Bhattacharya, Subhrajit; Saldaña, David
Forming and Controlling Hitches in Midair Using Aerial Robots Proceedings Article
In: 2023 IEEE International Conference on Robotics and Automation (ICRA 2023), 2023.
Abstract | BibTeX | Tags: aerial manipulation, aerial robot, catenary robot, hitches, modular robots | Links:
@inproceedings{hitches,
title = {Forming and Controlling Hitches in Midair Using Aerial Robots},
author = {Diego S. D’Antonio and Subhrajit Bhattacharya and David Saldaña},
url = {https://youtu.be/EFig0cOaFZ4
https://arxiv.org/abs/2303.07427},
doi = { https://doi.org/10.48550/arXiv.2303.07427},
year = {2023},
date = {2023-01-01},
urldate = {2023-01-01},
booktitle = {2023 IEEE International Conference on Robotics and Automation (ICRA 2023)},
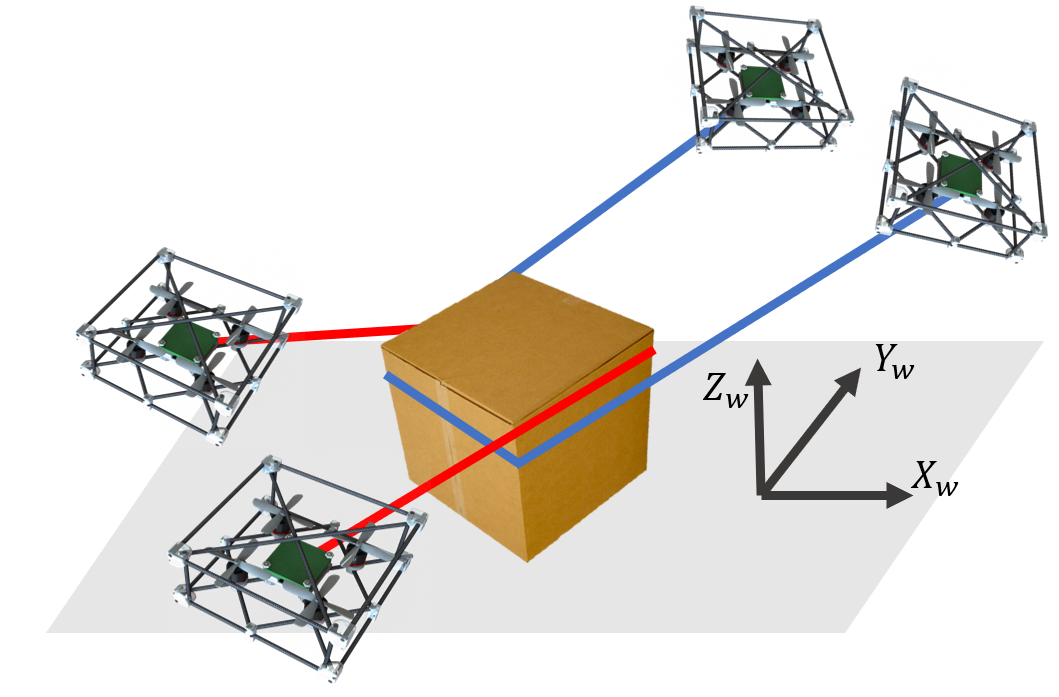
abstract = {The use of cables for aerial manipulation has shown to be a lightweight and versatile way to interact with objects. However, fastening objects using cables is still a challenge and human is required. In this work, we propose a novel way to secure objects using hitches. The hitch can be formed and morphed in midair using a team of aerial robots with cables. The hitch's shape is modeled as a convex polygon, making it versatile and adaptable to a wide variety of objects. We propose an algorithm to form the hitch systematically. The steps can run in parallel, allowing hitches with a large number of robots to be formed in constant time. We develop a set of actions that include different actions to change the shape of the hitch. We demonstrate our methods using a team of aerial robots via simulation and actual experiments.},
keywords = {aerial manipulation, aerial robot, catenary robot, hitches, modular robots},
pubstate = {published},
tppubtype = {inproceedings}
}
The use of cables for aerial manipulation has shown to be a lightweight and versatile way to interact with objects. However, fastening objects using cables is still a challenge and human is required. In this work, we propose a novel way to secure objects using hitches. The hitch can be formed and morphed in midair using a team of aerial robots with cables. The hitch's shape is modeled as a convex polygon, making it versatile and adaptable to a wide variety of objects. We propose an algorithm to form the hitch systematically. The steps can run in parallel, allowing hitches with a large number of robots to be formed in constant time. We develop a set of actions that include different actions to change the shape of the hitch. We demonstrate our methods using a team of aerial robots via simulation and actual experiments.
2022

Zhu, Brian; Xu, Jiawei; Charway, Andrew; Saldaña, David
PogoDrone: Design, Model, and Control of a Jumping Quadrotor Proceedings Article
In: 2022 IEEE International Conference on Robotics and Automation, 2022.
Abstract | BibTeX | Tags: aerial manipulation, aerial robot, quadrotor | Links:
@inproceedings{Zhu2022,
title = {PogoDrone: Design, Model, and Control of a Jumping Quadrotor},
author = {Brian Zhu and Jiawei Xu and Andrew Charway and David Saldaña},
url = {https://arxiv.org/pdf/2204.00207.pdf},
doi = {https://doi.org/10.48550/arXiv.2204.00207},
year = {2022},
date = {2022-04-01},
urldate = {2022-04-01},
booktitle = {2022 IEEE International Conference on Robotics and Automation},
abstract = {We present a design, model, and control for a novel jumping-flying robot that is called PogoDrone. The robot is composed of a quadrotor with a passive mechanism for jumping. The robot can continuously jump in place or fly like a normal quadrotor. Jumping in place allows the robot to quickly move and operate very close to the ground. For instance, in agricultural applications, the jumping mechanism allows the robot to take samples of soil. We propose a hybrid controller that switches from attitude to position control to allow the robot to fall horizontally and recover to the original position. We compare the jumping mode with the hovering mode to analyze the energy consumption. In simulations, we evaluate the effect of different factors on energy consumption. In real experiments, we show that our robot can repeatedly impact the ground, jump, and fly in a physical environment.},
keywords = {aerial manipulation, aerial robot, quadrotor},
pubstate = {published},
tppubtype = {inproceedings}
}
We present a design, model, and control for a novel jumping-flying robot that is called PogoDrone. The robot is composed of a quadrotor with a passive mechanism for jumping. The robot can continuously jump in place or fly like a normal quadrotor. Jumping in place allows the robot to quickly move and operate very close to the ground. For instance, in agricultural applications, the jumping mechanism allows the robot to take samples of soil. We propose a hybrid controller that switches from attitude to position control to allow the robot to fall horizontally and recover to the original position. We compare the jumping mode with the hovering mode to analyze the energy consumption. In simulations, we evaluate the effect of different factors on energy consumption. In real experiments, we show that our robot can repeatedly impact the ground, jump, and fly in a physical environment.
D’Antonio, Diego S.; Saldaña, David
Folding Knots Using a Team of Aerial Robots Proceedings Article
In: 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 3372-3377, 2022.
Abstract | BibTeX | Tags: aerial manipulation, aerial robot, catenary robot | Links:
@inproceedings{9981363,
title = {Folding Knots Using a Team of Aerial Robots},
author = {Diego S. D’Antonio and David Saldaña},
url = {https://arxiv.org/abs/2208.01482},
doi = {10.1109/IROS47612.2022.9981363},
year = {2022},
date = {2022-01-01},
urldate = {2022-01-01},
booktitle = {2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages = {3372-3377},
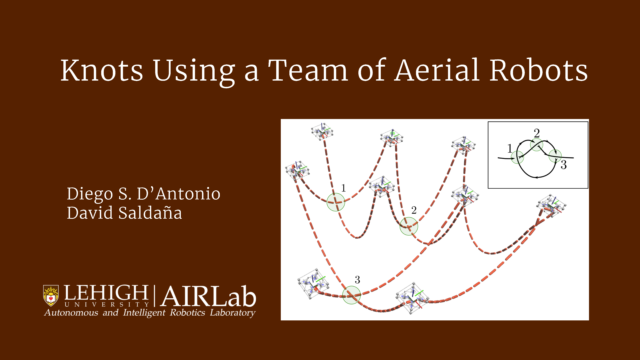
abstract = {From ancient times, humans have been using cables and ropes to tie, carry, and manipulate objects by folding knots. However, automating knot folding is challenging because it requires dexterity to move a cable over and under itself. In this paper, we propose a method to fold knots in midair using a team of aerial vehicles. We take advantage of the fact that vehicles are able to fly in between cable segments without any re-grasping. So the team grasps the cable from the floor, and releases it once the knot is folded. Based on a composition of catenary curves, we simplify the complexity of dealing with an infinite-dimensional configuration space of the cable, and formally propose a new knot representation. Such representation allows us to design a trajectory that can be used to fold knots using a leader-follower approach. We show that our method works for different types of knots in simulations. Additionally, we show that our solution is also computationally efficient and can be executed in real-time.},
keywords = {aerial manipulation, aerial robot, catenary robot},
pubstate = {published},
tppubtype = {inproceedings}
}
From ancient times, humans have been using cables and ropes to tie, carry, and manipulate objects by folding knots. However, automating knot folding is challenging because it requires dexterity to move a cable over and under itself. In this paper, we propose a method to fold knots in midair using a team of aerial vehicles. We take advantage of the fact that vehicles are able to fly in between cable segments without any re-grasping. So the team grasps the cable from the floor, and releases it once the knot is folded. Based on a composition of catenary curves, we simplify the complexity of dealing with an infinite-dimensional configuration space of the cable, and formally propose a new knot representation. Such representation allows us to design a trajectory that can be used to fold knots using a leader-follower approach. We show that our method works for different types of knots in simulations. Additionally, we show that our solution is also computationally efficient and can be executed in real-time.
2021
Xu, Jiawei; D’Antonio, Diego S.; Saldaña, David
H-ModQuad: Modular Multi-Rotors with 4, 5, and 6 Controllable DOF Proceedings Article
In: 2021 IEEE International Conference on Robotics and Automation (ICRA), 2021, ISBN: 978-1-7281-9077-8.
Abstract | BibTeX | Tags: aerial robot, modquad, modular robots, multi-rotor, quadrotor | Links:
@inproceedings{,
title = {H-ModQuad: Modular Multi-Rotors with 4, 5, and 6 Controllable DOF},
author = {Jiawei Xu and Diego S. D’Antonio and David Saldaña},
url = {https://youtu.be/olKYuWPWxHo
https://arxiv.org/pdf/2106.04048.pdf},
doi = {10.1109/ICRA48506.2021.9561016},
isbn = {978-1-7281-9077-8},
year = {2021},
date = {2021-10-18},
urldate = {2021-10-18},
booktitle = {2021 IEEE International Conference on Robotics and Automation (ICRA)},
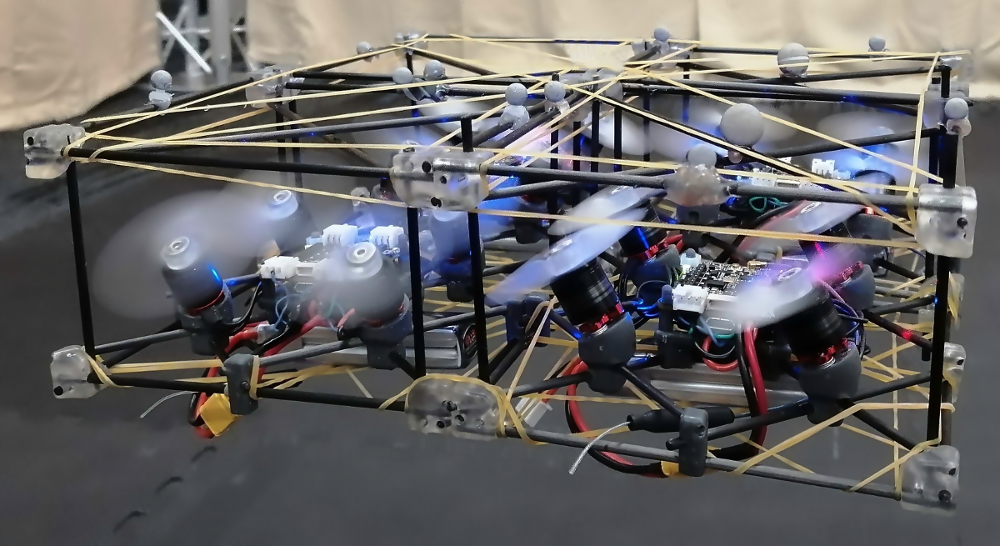
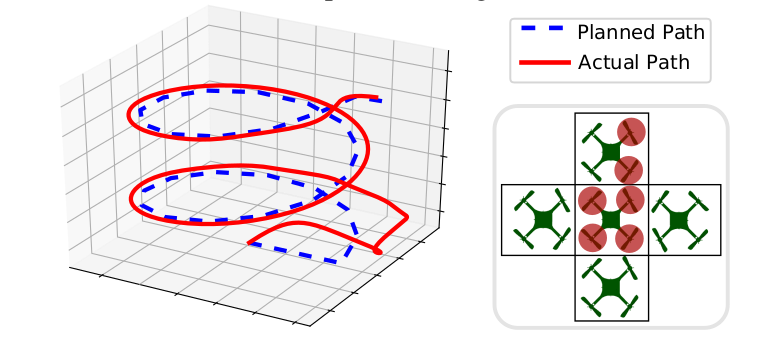
abstract = {Traditional aerial vehicles are usually custom-designed for specific tasks. Although they offer an efficient solution, they are not always able to adapt to changes in the task specification, e.g., increasing the payload. This applies to quadrotors, having a maximum payload and only four controllable degrees of freedom, limiting their adaptability to the task’s variations. We propose a versatile modular robotic system that can increase its payload and degrees of freedom by assembling heterogeneous modules; we call it H-ModQuad. It consists of cuboid modules propelled by quadrotors with tilted propellers that can generate forces in different directions. By connecting different types of modules, an H-ModQuad can increase its controllable degrees of freedom from 4 to 5 and 6. We model the general structure and propose three controllers, one for each number of controllable degrees of freedom. We extend the concept of the actuation ellipsoid to find the best reference orientation that can maximize the performance of the structure. Our approach is validated with experiments using actual robots, showing the independence of the translation and orientation of a structure.},
keywords = {aerial robot, modquad, modular robots, multi-rotor, quadrotor},
pubstate = {published},
tppubtype = {inproceedings}
}
Traditional aerial vehicles are usually custom-designed for specific tasks. Although they offer an efficient solution, they are not always able to adapt to changes in the task specification, e.g., increasing the payload. This applies to quadrotors, having a maximum payload and only four controllable degrees of freedom, limiting their adaptability to the task’s variations. We propose a versatile modular robotic system that can increase its payload and degrees of freedom by assembling heterogeneous modules; we call it H-ModQuad. It consists of cuboid modules propelled by quadrotors with tilted propellers that can generate forces in different directions. By connecting different types of modules, an H-ModQuad can increase its controllable degrees of freedom from 4 to 5 and 6. We model the general structure and propose three controllers, one for each number of controllable degrees of freedom. We extend the concept of the actuation ellipsoid to find the best reference orientation that can maximize the performance of the structure. Our approach is validated with experiments using actual robots, showing the independence of the translation and orientation of a structure.
Cardona, Gustavo A.; D’Antonio, Diego S.; Vasile, Cristian-Ioan; Saldaña, David
Non-Prehensile Manipulation of Cuboid Objects Using a Catenary Robot Proceedings Article
In: 2021.
Abstract | BibTeX | Tags: aerial manipulation, aerial robot, cable, catenary robot, quadrotor | Links:
@inproceedings{nokey,
title = {Non-Prehensile Manipulation of Cuboid Objects Using a Catenary Robot},
author = {Gustavo A. Cardona and Diego S. D’Antonio and Cristian-Ioan Vasile and David Saldaña},
url = {https://youtu.be/Ou6DPlXPE7A},
year = {2021},
date = {2021-08-13},
urldate = {2021-08-13},
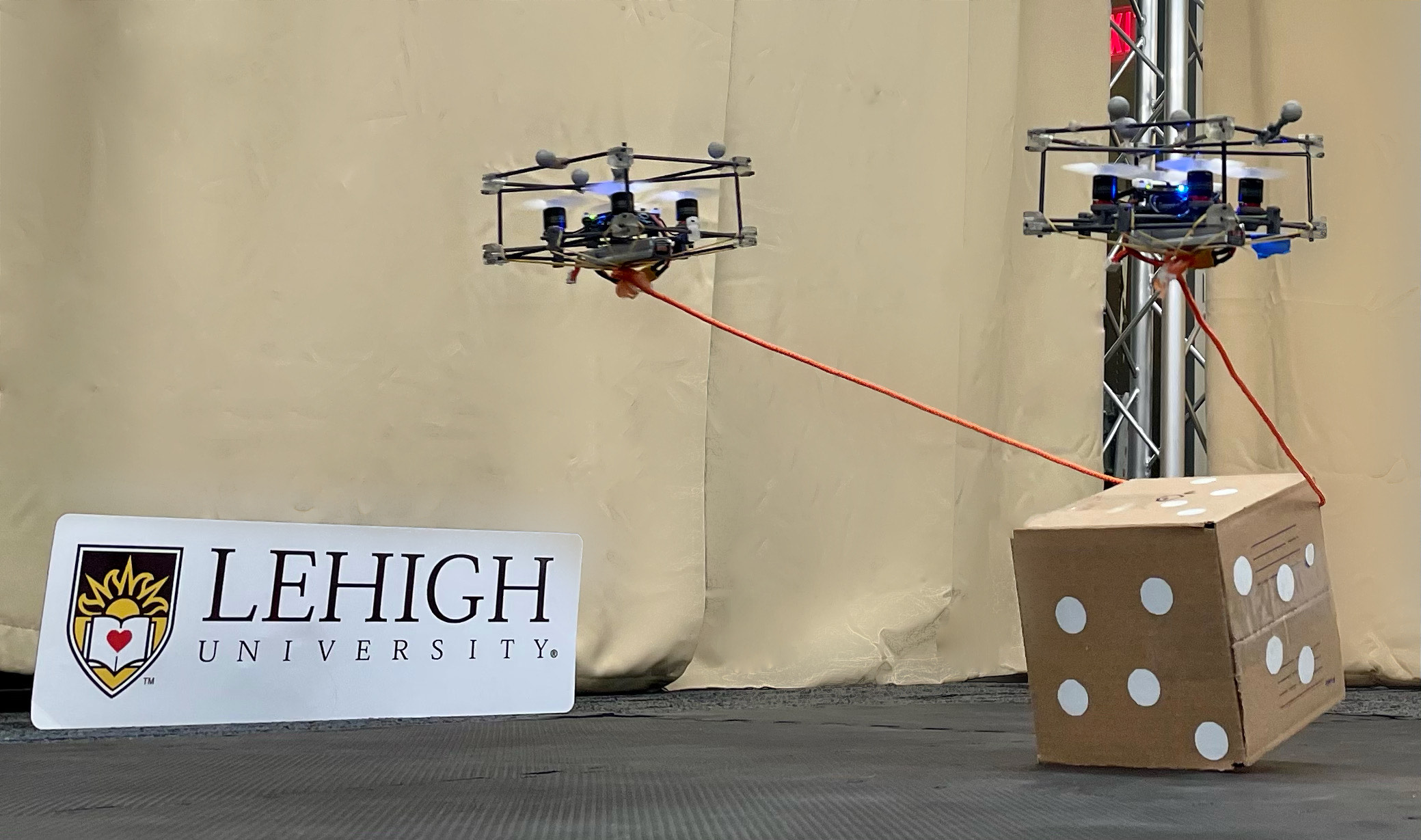
abstract = {Transporting objects using quadrotors with cables has been widely studied in the literature. However, most of those approaches assume that the cables are previously attached to the load by human intervention. In tasks where multiple objects need to be moved, the efficiency of the robotic system is constrained by the requirement of manual labor. Our approach uses a non-stretchable cable connected to two quadrotors, which we call the catenary robot, that fully automates the transportation task. Using the cable, we can roll and drag the cuboid object (box) on planar surfaces. Depending on the surface type, we choose the proper action, dragging for low friction, and rolling for high friction. Therefore, the transportation process does not require any human intervention as we use the cable to interact with the box without requiring fastening. We validate our control design in simulation and with actual robots, where we show them rolling and dragging boxes to track desired trajectories.},
keywords = {aerial manipulation, aerial robot, cable, catenary robot, quadrotor},
pubstate = {published},
tppubtype = {inproceedings}
}
Transporting objects using quadrotors with cables has been widely studied in the literature. However, most of those approaches assume that the cables are previously attached to the load by human intervention. In tasks where multiple objects need to be moved, the efficiency of the robotic system is constrained by the requirement of manual labor. Our approach uses a non-stretchable cable connected to two quadrotors, which we call the catenary robot, that fully automates the transportation task. Using the cable, we can roll and drag the cuboid object (box) on planar surfaces. Depending on the surface type, we choose the proper action, dragging for low friction, and rolling for high friction. Therefore, the transportation process does not require any human intervention as we use the cable to interact with the box without requiring fastening. We validate our control design in simulation and with actual robots, where we show them rolling and dragging boxes to track desired trajectories.

D’Antonio, Diego S.; Cardona, Gustavo A.; Saldaña, David
The Catenary Robot: Design and Control of a Cable Propelled by Two Quadrotors Journal Article
In: IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 3857-3863, 2021, ISSN: 2377-3766.
Abstract | BibTeX | Tags: aerial manipulation, aerial robot, cable, catenary robot, quadrotor | Links:
@article{,
title = {The Catenary Robot: Design and Control of a Cable Propelled by Two Quadrotors},
author = {Diego S. D’Antonio and Gustavo A. Cardona and David Saldaña },
url = {https://youtu.be/3SaKKjl6os0},
doi = {10.1109/LRA.2021.3062603},
issn = {2377-3766},
year = {2021},
date = {2021-02-26},
urldate = {2021-02-26},
journal = {IEEE Robotics and Automation Letters},
volume = {6},
number = {2},
pages = {3857-3863},
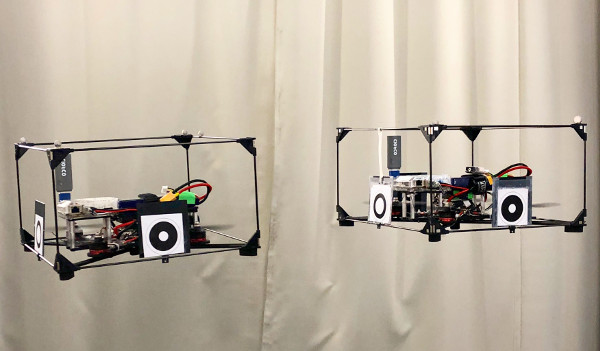
abstract = {Transporting objects using aerial robots has been widely studied in the literature. Still, those approaches always assume that the connection between the quadrotor and the load is made in a previous stage. However, that previous stage usually requires human intervention, and autonomous procedures to locate and attach the object are not considered. Additionally, most of the approaches assume cables as rigid links, but manipulating cables requires considering the state when the cables are hanging. In this work, we design and control a catenary robot. Our robot is able to transport hook-shaped objects in the environment. The robotic system is composed of two quadrotors attached to the two ends of a cable. By defining the catenary curve with five degrees of freedom, position in 3-D, orientation in z-axis, and span, we can drive the two quadrotors to track a given trajectory. We validate our approach with simulations and real robots. We present four different scenarios of experiments. Our numerical solution is computationally fast and can be executed in real-time.},
keywords = {aerial manipulation, aerial robot, cable, catenary robot, quadrotor},
pubstate = {published},
tppubtype = {article}
}
Transporting objects using aerial robots has been widely studied in the literature. Still, those approaches always assume that the connection between the quadrotor and the load is made in a previous stage. However, that previous stage usually requires human intervention, and autonomous procedures to locate and attach the object are not considered. Additionally, most of the approaches assume cables as rigid links, but manipulating cables requires considering the state when the cables are hanging. In this work, we design and control a catenary robot. Our robot is able to transport hook-shaped objects in the environment. The robotic system is composed of two quadrotors attached to the two ends of a cable. By defining the catenary curve with five degrees of freedom, position in 3-D, orientation in z-axis, and span, we can drive the two quadrotors to track a given trajectory. We validate our approach with simulations and real robots. We present four different scenarios of experiments. Our numerical solution is computationally fast and can be executed in real-time.
Cardona, Gustavo A.; D’Antonio, Diego S.; Fierro, Rafael; Saldaña, David
Adaptive Control for Cooperative Aerial Transportation Using Catenary Robots Proceedings Article
In: 2021 Aerial Robotic Systems Physically Interacting with the Environment (AIRPHARO), pp. 1-8, 2021.
BibTeX | Tags: aerial manipulation, aerial robot, cable, catenary robot, quadrotor | Links:
@inproceedings{9571068,
title = {Adaptive Control for Cooperative Aerial Transportation Using Catenary Robots},
author = {Gustavo A. Cardona and Diego S. D’Antonio and Rafael Fierro and David Saldaña},
url = {https://youtu.be/MeEGL_PUBx4},
doi = {10.1109/AIRPHARO52252.2021.9571068},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
booktitle = {2021 Aerial Robotic Systems Physically Interacting with the Environment (AIRPHARO)},
pages = {1-8},
keywords = {aerial manipulation, aerial robot, cable, catenary robot, quadrotor},
pubstate = {published},
tppubtype = {inproceedings}
}
Gabrich, Bruno; Saldaña, David; Yim, Mark
Finding Structure Configurations for Flying Modular Robots Proceedings Article
In: 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 6970-6976, 2021.
BibTeX | Tags: aerial robot, modquad, modular robots, multi-rotor, quadrotor, self-reconfiguration algorithms | Links:
@inproceedings{finding2021gabrich,
title = {Finding Structure Configurations for Flying Modular Robots},
author = {Bruno Gabrich and David Saldaña and Mark Yim},
doi = {10.1109/IROS51168.2021.9636086},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
booktitle = {2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
pages = {6970-6976},
keywords = {aerial robot, modquad, modular robots, multi-rotor, quadrotor, self-reconfiguration algorithms},
pubstate = {published},
tppubtype = {inproceedings}
}

Litman, Yehonathan; Gandhi, Neeraj; Phan, Linh Thi Xuan; Saldaña, David
Vision-Based Self-Assembly for Modular Multirotor Structures Journal Article
In: IEEE Robotics and Automation Letters, vol. 6, no. 2, pp. 2202-2208, 2021.
BibTeX | Tags: aerial robot, computer vision, modquad, modular robots, multi-rotor, quadrotor, self-reconfiguration algorithms | Links:
@article{ral20vi2,
title = {Vision-Based Self-Assembly for Modular Multirotor Structures},
author = {Yehonathan Litman and Neeraj Gandhi and Linh Thi Xuan Phan and David Saldaña},
doi = {10.1109/LRA.2021.3061380},
year = {2021},
date = {2021-01-01},
urldate = {2021-01-01},
journal = {IEEE Robotics and Automation Letters},
volume = {6},
number = {2},
pages = {2202-2208},
keywords = {aerial robot, computer vision, modquad, modular robots, multi-rotor, quadrotor, self-reconfiguration algorithms},
pubstate = {published},
tppubtype = {article}
}
2020
Gandhi, Neeraj; Saldaña, David; Kumar, Vijay; Phan, Linh T. X.
Self-Reconfiguration in Response to Faults in Modular Aerial Systems Journal Article
In: IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 2522-2529, 2020.
BibTeX | Tags: aerial robot, modquad, modular robots, multi-rotor, quadrotor, self-reconfiguration algorithms
@article{gandhi2020self,
title = {Self-Reconfiguration in Response to Faults in Modular Aerial Systems},
author = {Neeraj Gandhi and David Saldaña and Vijay Kumar and Linh T. X. Phan},
year = {2020},
date = {2020-01-01},
urldate = {2020-01-01},
journal = {IEEE Robotics and Automation Letters},
volume = {5},
number = {2},
pages = {2522-2529},
keywords = {aerial robot, modquad, modular robots, multi-rotor, quadrotor, self-reconfiguration algorithms},
pubstate = {published},
tppubtype = {article}
}
2019

Saldaña, David; Gupta, P. M.; Kumar, Vijay
Design and Control of Aerial Modules for Inflight Self-Disassembly Journal Article
In: IEEE Robotics and Automation Letters, vol. 4, no. 4, pp. 3410-3417, 2019, ISSN: 2377-3766.
BibTeX | Tags: aerial robot, modquad, modular robots, multi-rotor, quadrotor, self-reconfiguration algorithms | Links:
@article{ral19iros,
title = {Design and Control of Aerial Modules for Inflight Self-Disassembly},
author = {David Saldaña and P. M. Gupta and Vijay Kumar},
doi = {10.1109/LRA.2019.2926680},
issn = {2377-3766},
year = {2019},
date = {2019-10-01},
urldate = {2019-10-01},
journal = {IEEE Robotics and Automation Letters},
volume = {4},
number = {4},
pages = {3410-3417},
keywords = {aerial robot, modquad, modular robots, multi-rotor, quadrotor, self-reconfiguration algorithms},
pubstate = {published},
tppubtype = {article}
}
Li, Guanrui; Gabrich, Bruno; Saldaña, David; Das, Jnaneshwar; Kumar, Vijay; Yim, Mark
ModQuad-Vi: A Vision-Based Self-Assembling Modular Quadrotor Proceedings Article
In: 2019 International Conference on Robotics and Automation (ICRA), pp. 346-352, 2019.
BibTeX | Tags: aerial robot, computer vision, modquad, modular robots, multi-rotor, quadrotor, self-reconfiguration algorithms | Links:
@inproceedings{8794056,
title = {ModQuad-Vi: A Vision-Based Self-Assembling Modular Quadrotor},
author = {Guanrui Li and Bruno Gabrich and David Saldaña and Jnaneshwar Das and Vijay Kumar and Mark Yim},
doi = {10.1109/ICRA.2019.8794056},
year = {2019},
date = {2019-01-01},
urldate = {2019-01-01},
booktitle = {2019 International Conference on Robotics and Automation (ICRA)},
pages = {346-352},
keywords = {aerial robot, computer vision, modquad, modular robots, multi-rotor, quadrotor, self-reconfiguration algorithms},
pubstate = {published},
tppubtype = {inproceedings}
}
2018

Gabrich, Bruno; Saldaña, David; Kumar, Vijay; Yim, Mark
A Flying Gripper Based on Cuboid Modular Robots Proceedings Article
In: 2018 IEEE International Conference on Robotics and Automation (ICRA), pp. 7024-7030, 2018, ISSN: 2577-087X.
BibTeX | Tags: aerial manipulation, aerial robot, gripper, modquad, modular robots, multi-rotor, quadrotor | Links:
@inproceedings{icra18gripper,
title = {A Flying Gripper Based on Cuboid Modular Robots},
author = {Bruno Gabrich and David Saldaña and Vijay Kumar and Mark Yim},
url = {https://youtu.be/43RSgWRLhJc},
doi = {10.1109/ICRA.2018.8460682},
issn = {2577-087X},
year = {2018},
date = {2018-05-01},
urldate = {2018-05-01},
booktitle = {2018 IEEE International Conference on Robotics and Automation (ICRA)},
pages = {7024-7030},
keywords = {aerial manipulation, aerial robot, gripper, modquad, modular robots, multi-rotor, quadrotor},
pubstate = {published},
tppubtype = {inproceedings}
}
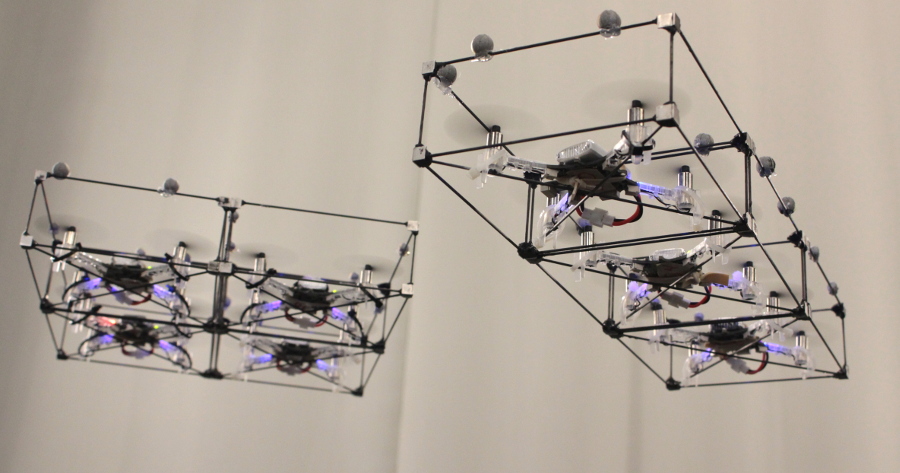
Saldaña, David; Gabrich, Bruno; Li, Guanrui; Yim, Mark; Kumar, Vijay
ModQuad: The Flying Modular Structure that Self-Assembles in Midair Proceedings Article
In: 2018 IEEE International Conference on Robotics and Automation (ICRA), pp. 691-698, 2018, ISSN: 2577-087X.
BibTeX | Tags: aerial robot, modquad, modular robots, multi-rotor, quadrotor, self-reconfiguration algorithms | Links:
@inproceedings{icra18modquad,
title = {ModQuad: The Flying Modular Structure that Self-Assembles in Midair},
author = {David Saldaña and Bruno Gabrich and Guanrui Li and Mark Yim and Vijay Kumar},
url = {https://youtu.be/t9kXrhDwXf0},
doi = {10.1109/ICRA.2018.8461014},
issn = {2577-087X},
year = {2018},
date = {2018-05-01},
urldate = {2018-05-01},
booktitle = {2018 IEEE International Conference on Robotics and Automation (ICRA)},
pages = {691-698},
keywords = {aerial robot, modquad, modular robots, multi-rotor, quadrotor, self-reconfiguration algorithms},
pubstate = {published},
tppubtype = {inproceedings}
}

© 2021 SwarmsLab. All rights reserved